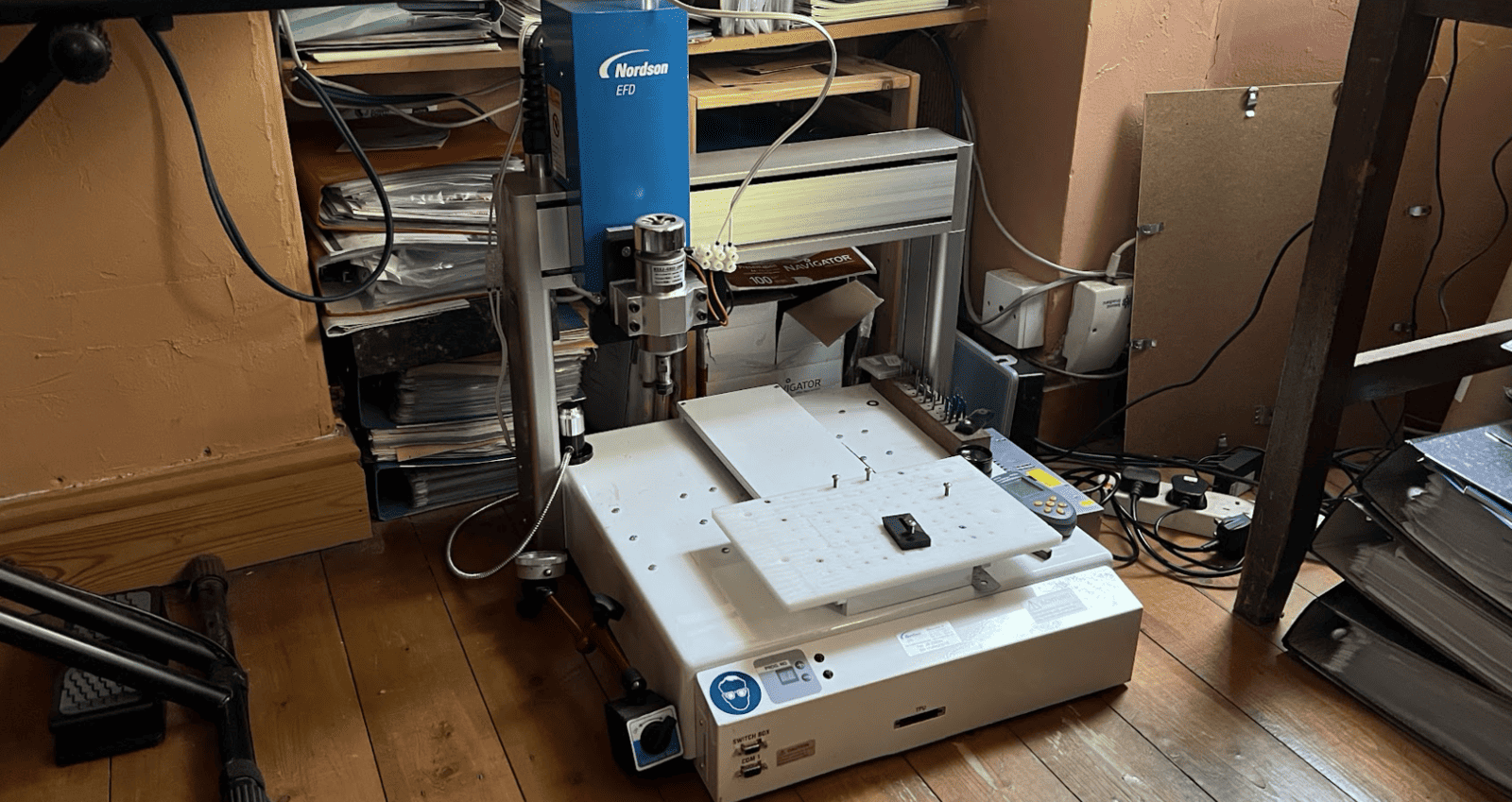
A friend gave me an old industrial robot the other week. Yay! OK, “robot” sounds fancy. It’s a cartesian robot, just a posh name for summat that can move in…
A friend gave me an old industrial robot the other week. Yay! OK, “robot” sounds fancy. It’s a cartesian robot, just a posh name for summat that can move in…
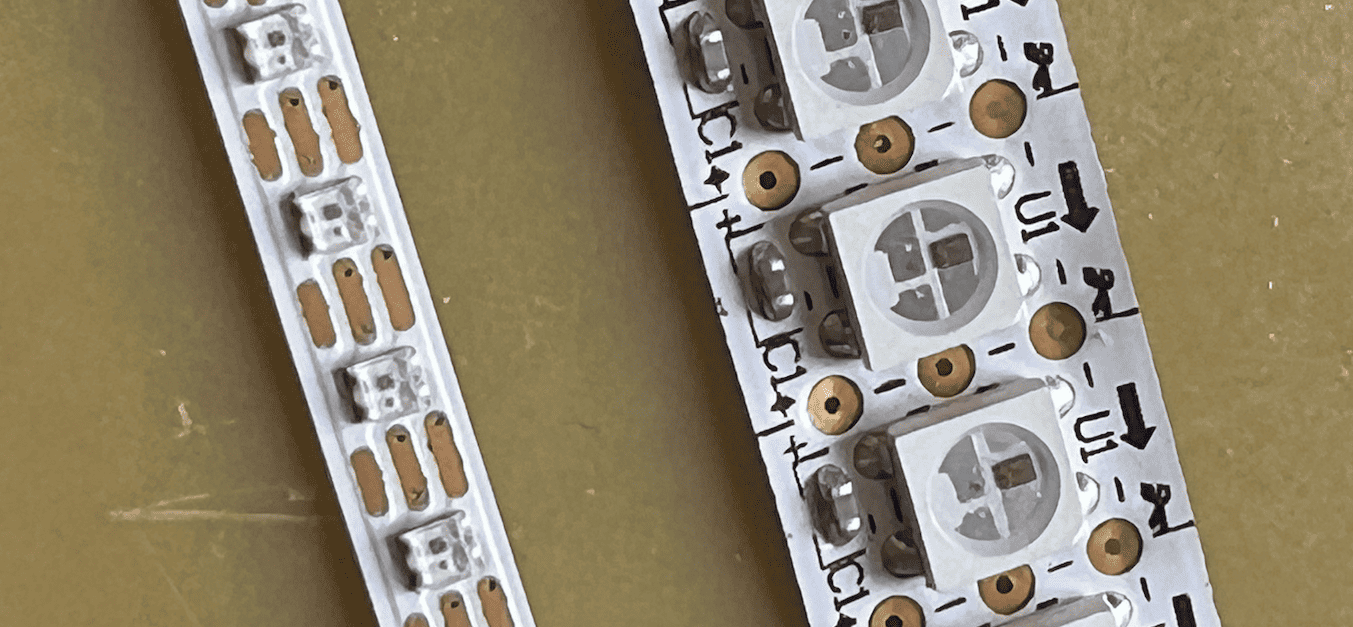
Addressable LEDs — the ones with a tiny microcontroller built into them, so you can connect a bunch with a single data wire and yet still control each one individually…
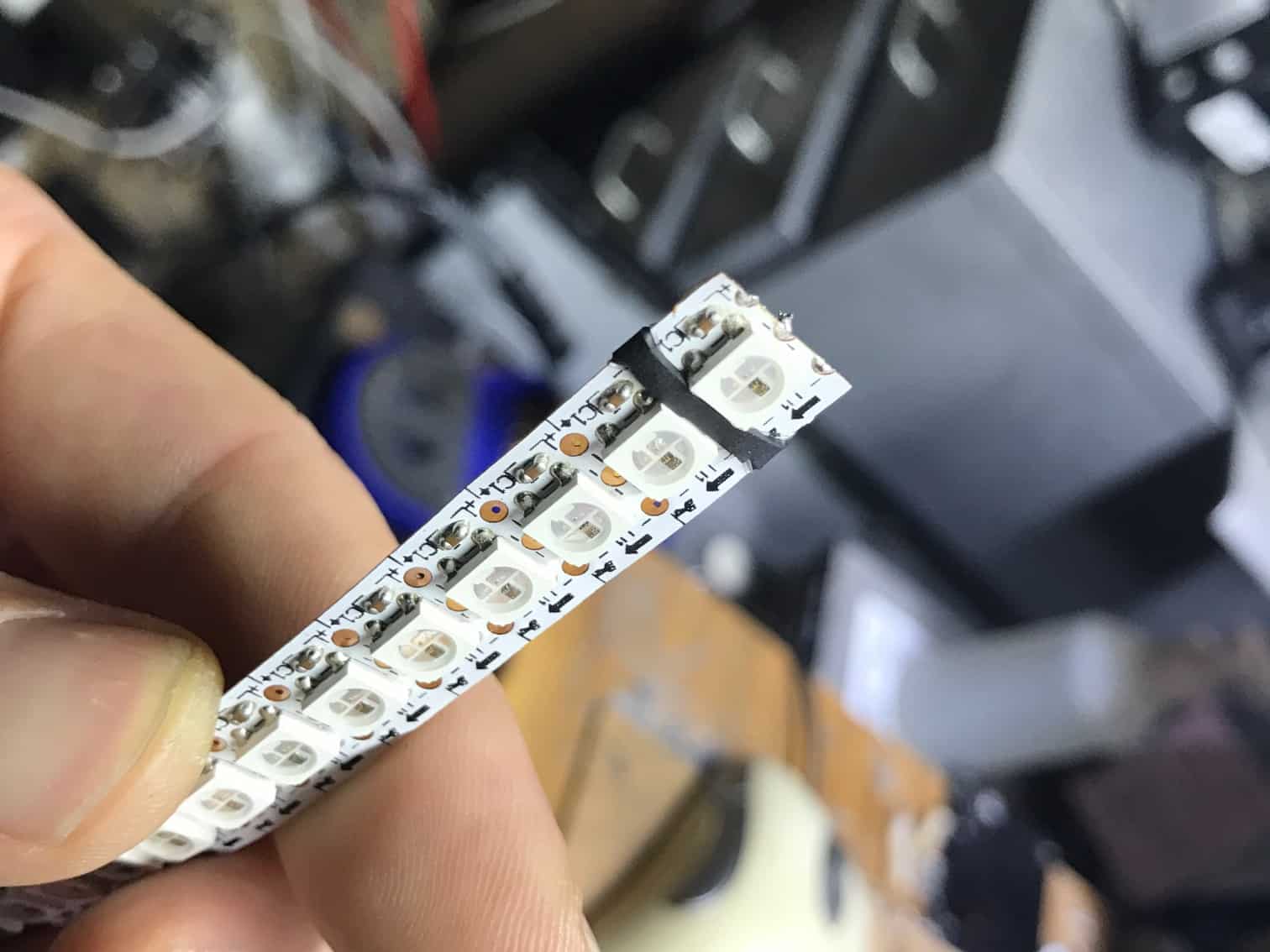
A friend wants a Knight Rider style Larson scanner for the back of his cycle helmet. Simple enough. Especially now we have intelligent LED strips available, which only need power plus…
Man, I hate drilling holes in PCBs. I make my boards with a mill, so it shouldn’t be too hard to swap the V-cutting bit for a drill bit, but…

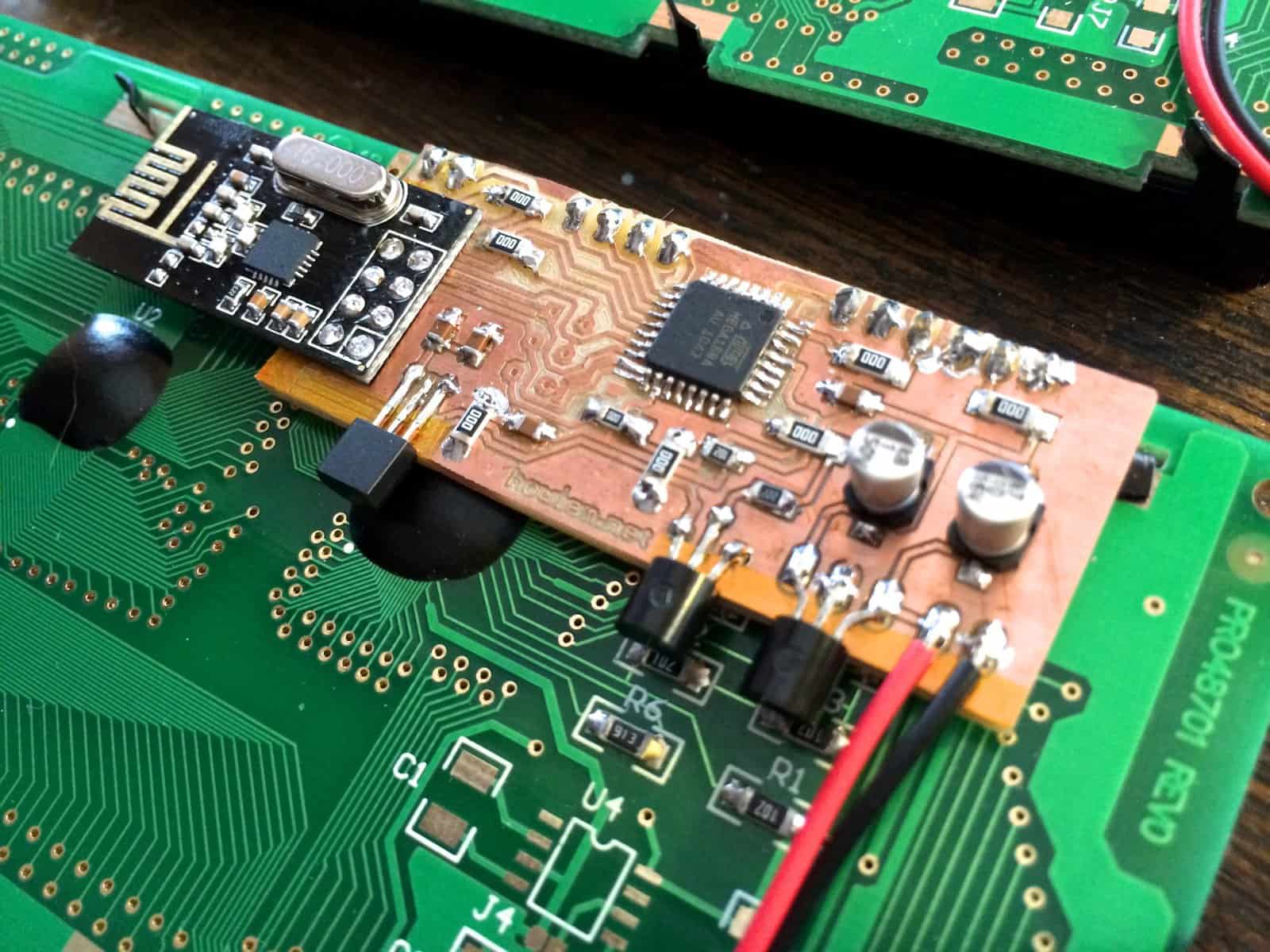
A friend of mine has had his recording studio fitted out with custom built furniture and wanted a smart control panel to give quick access to some bits and pieces….
The source code is online. Warning: it’s awful. It has worked, and may still work, but it’s offered more for entertainment than anything else. There are several thousand hard-coded gotchas,…
Most swear boxes work the wrong way round: you say something naughty, then you have to put money in the box as penance. This is the opposite – press the…
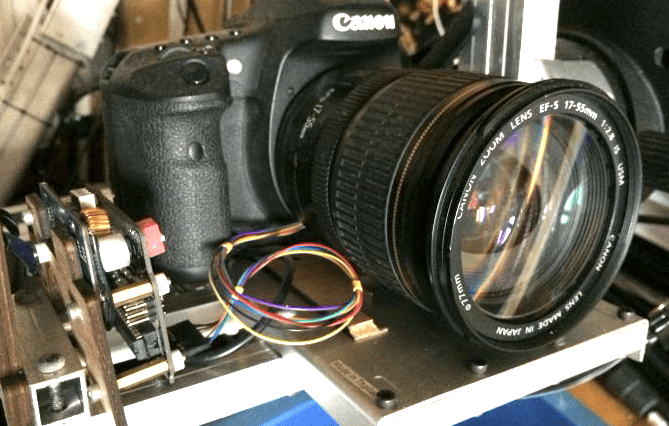
OK then, time to explain some things. I’ve always wanted to play with a motion control rig. Ever since seeing a behind-the-scenes documentary about Star Wars, showing how they filmed…
I always knew I was going to need focus control of some sort. Not much point being able to have my camera move around if it couldn’t keep its subject…
So. In the bad old days, I chucked some solar panels on our extension roof, ran some cables to the attic, and had this sort of mess going on: Cheapo…